
building a Pilot-type stabilizer…
© 2011 by KV5R — Rev. July 12, 2011.
Shop for Camera Stabilizers here.
About
This is the story of building a homemade video camera stabilizer, commonly known as a Steadicam. This one is similar to a Pilot, though not nearly as pretty, it works quite well. I used common hardware and tools, with the exception of a cross-slide vise for the drill press, and an end mill, for cutting slots. Instead of the usual two weight legs, I used three, so it will stand up like a little tripod. The homemade gimbal assembly uses PVC, aluminum, setscrews, and skateboard bearings. The vertical shaft is common 5⁄16ths all-thread. The camera stage is a simple block of aluminum, not adjustable, but the balance is achieved via the three weight legs on the base.
I also obtained a small camcorder, an Aiptek H5 Extreme, which does full HD at 1080p. The whole rig weighs 2.2 pounds (1kg), and may be handheld or body-mounted.
I spent over a week working on this project and learned a lot from trial and error. I built three gimbals (and four gimbal yokes) before I got it right, and I spent a whole day just working on a crummy cross-slide vise for the drill press. The gimbal was by far the hardest part to build—I finally learned that the three axes must cross exactly in the center of the shaft, and if they don’t you’ll never get the stabilizer to properly balance.
Update
4 Aug 2011—With the addition of filter threads to the H5, I needed to build an x-y stage for the top of the stabilizer. It’s not a fancy micrometer dovetail stage, but it works, allowing movement of the camera to acommodate balancing of different lens accessories. See the added photos and commentary below on how I built it.
Better in 480p, fullscreen…
Notes
Be sure to read the previous articles, where I built two Merlin-type stabilizers. See also my article on the horrible $30 cross-slide vise.
- This rig uses a 24″ vertical shaft (later cut down to 18″—better), a gimbal assembly, three weight legs, a simple body mount, and the Aiptek H5 Extreme camcorder.
- This design is considerably more complicated than the Merlin-type design, but performs more like a commercial Steadicam or Glidecam rig. It is more difficult to run than the Merlin-type, because it requires two hands.
- The total weight of the system (with camera) is a mere 2.2 pounds (1 kg) but it has plenty of rotational mass, with nearly one-half of that weight being on the six-inch legs, forming a one-foot circle of mass.
- It is aerodynamically balanced, needed because the extended display on the camera wind vanes in the breeze.
- I built three gimbals. The last one, near the end of this article, is the one you want.
- I spent around $50 in sundry parts and hardware, and worked on it for about six days.
- I spent $45 and another day working on the cheapo $30 cross-slide vise, and $15 on the carbide end mill, so I could cut slots in aluminum on the drill press.
- Don’t believe all those videos that say you can build one of these for $25! All those giblets (and shipping charges) add up, and you’ll likely end up with a considerable amount of scraps, spares, and tools—they just add to your future project stock.
- In this article, the double-prime ″ is used to indicate inches. This is the proper symbol, not to be confused with the common straight double-quote " or the typographic right-quotation mark ”. Also, the proper typographic symbols for times ×, fraction slash ⁄, and approx ≈ are employed. If you see little boxes or question marks instead, you need to use a better browser that supports HTML entities.
Tools
- Milling machine (or a good cross-slide vise) with ¼″ end mill
- Drill press and drill bits
- ¼-20 and 5⁄16th-18 tapered taps
- Table saw (or power miter saw) with 40T carbide blade for cutting aluminum and PVC
- Air compressor
- All the usual hand tools
- Be sure to always wear safety glasses. You’ll see below what happens when a fitting unexpectedly shatters on the table saw.
Materials
This is not a shopping list; just what I used, and some of it was unnecessary.
If you’re in a metric country, you can use 7 and 8 mm hardware.
- several inches of ¼×2″ aluminum flat-bar (camera plate)
- 18 inches of 1⁄8th×1 aluminum flat-bar (three 6″ weight legs)
- 7 inches of 1⁄8th×1 aluminum flat-bar (gimbal yoke)
- 24 inches of 5⁄16th-18 all-thread rod (18 inches is better)
- ≈2 feet of ½″ schedule 40 PVC pipe
- 2) PVC ½″ Tee
- 1) PVC ½″ 45°
- Sundry 5⁄16th and ¼″ bolts and machine screws; flat-washers, fender washers, lock-washers, nuts, lock-nuts, and wing-nuts (go all stainless if you can)
- 1) 36″ light-duty bungee cord (or latex tubing)
- 1) skateboard wheel
- 4) skateboard bearings (type 607 – 22×8×7mm) I ended up using only two.
- 3) skateboard bearing spacers
- 2) 10-24×1 pointed setscrews (too long) and 10-24 lock-nuts
- a couple feet of 3⁄8ths O.D. × 5⁄16ths I.D. polyethylene or PEX tubing
- a flat-bottomed polyethylene food container from which you can cut wind vane(s) as needed
Photos and Notes
Prep the Bearings
The skateboard bearings won’t be spinning fast or bearing any significant load, but they need the lowest possible breakaway friction. Wash out all the grease and replace it with WD-40.

Remove the seals with a pin,

soak them in a solvent,

and blow them out. Hold the air nozzle at a near-right-angle so
the bearing doesn’t spin too fast, or will will explode and kill you.

Then put WD-40 in them for corrosion control, and snap the seals back in.
Gimbal Assembly v.1 (failed)
This seemed like an easy way to make a gimbal, but in practice it didn’t work out so well. For this to work, the side bearings that form the X-axis must be exactly aligned with each other, the Y-axis (vertical) bearing must be exactly between them, and the Z-axis (in the handle) must be exactly centered, and the yoke must be exactly symmetrical. It’s not as easy as it sounds! Even a .001″ misalignment and the stabilizer will always tilt, no matter how well it’s balanced.
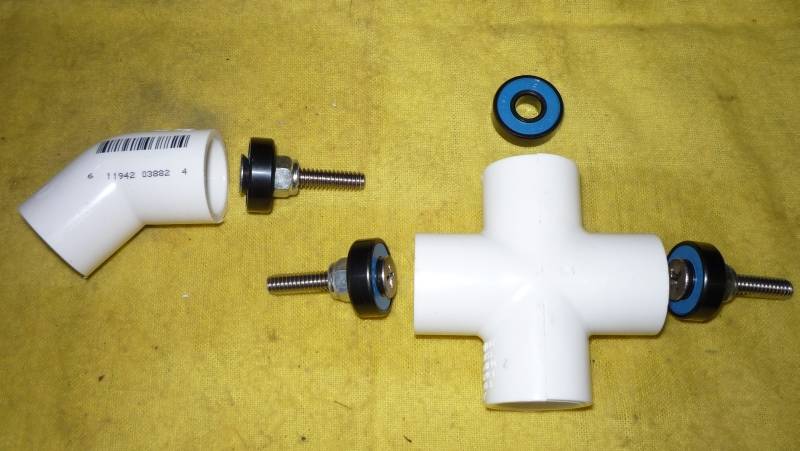
This is how I planned to build the gimbal. I first cut the fittings down some, then heated
them up and pressed the bearings in. The I.D. of the ½″ pipe fittings is about .840,
and the O.D. of the bearings is .866 (22mm).
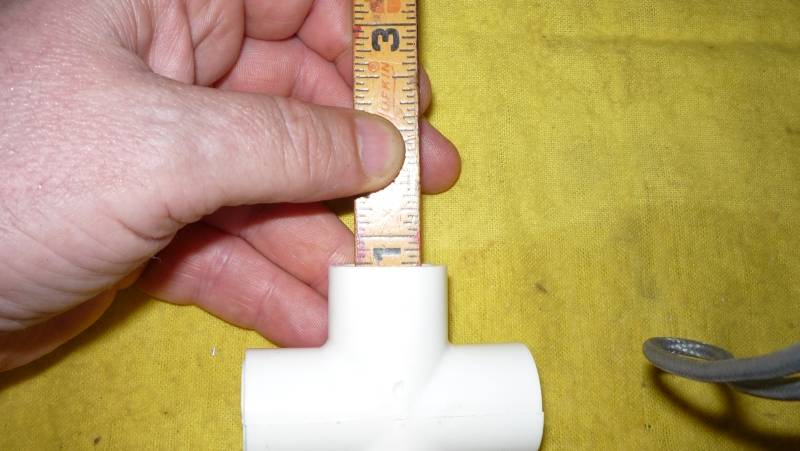
The collars in the fittings are .750 (¾) inch inside, so we need to cut some off.
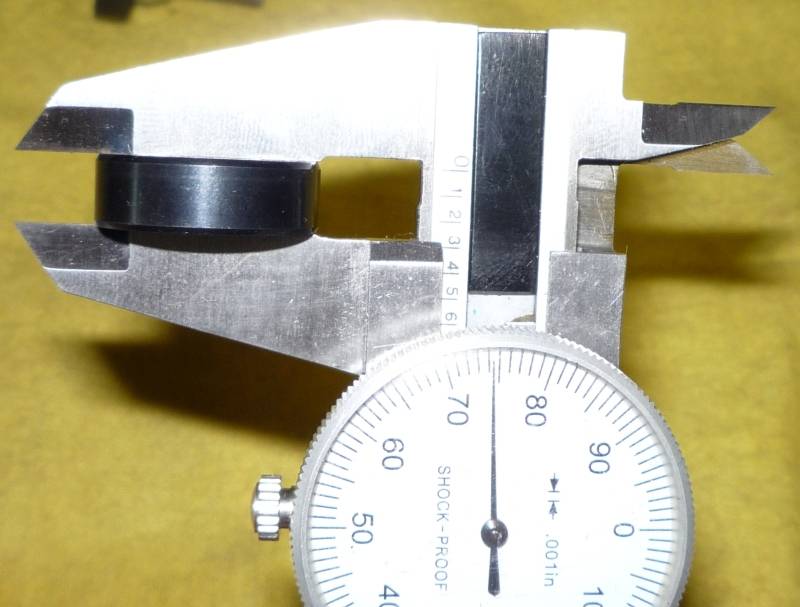
The bearing is about .275 (7mm) wide,

and I want a little extra to shrink down and capture the bearing.
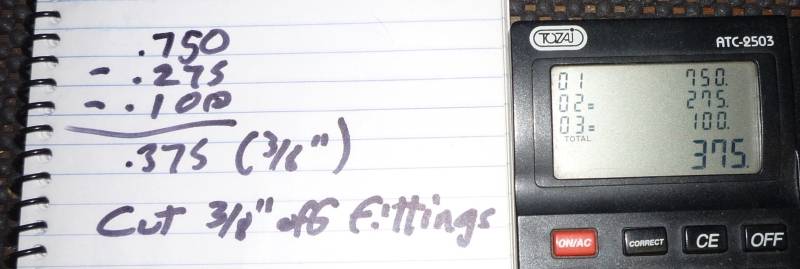
So I need to cut off 3⁄8ths-inch.

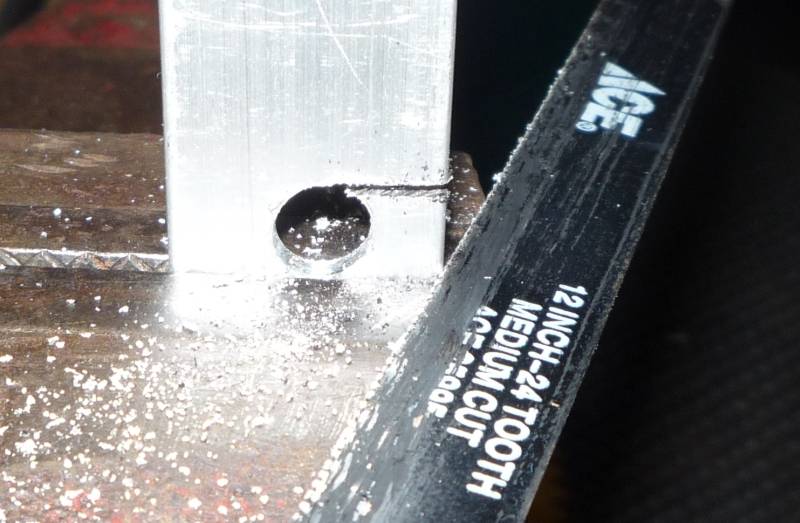
Setting up the cut.

OUCH! The fitting shattered! Inspection reveals that my saw blade has a couple of broken
teeth. And that, kids, is why you always wear safety glasses when running power tools.
A heavy shirt is a good idea, too 😉

Here’s about how the assembly will go. Note that I used ¼″ countersink (flat-head)
SS machine screws, so they’ll self-center in the bearings. Note also the “Nylock” nuts.
You don’t want lock-washers here because they’ll tighten unevenly and shift the bolt.

Heating the fittings in boiling water doesn’t work—212°F isn’t hot enough—you need them
about 250°F. I heated them with a propane torch, which always scorches and distorts the PVC.
Buy a heat-gun tool and set it on low, and heat the fitting slowly—much better.

Nope, I don’t like the way this is looking. Start over.
Gimbal Assembly v.2 (better, but still failed)
This time I decided to bore the fitting instead of heating it. This one would have worked if I had bored it straight.

I measured this spade bit, and it’s just a bit under the size of the bearings,
so I used it to bore out the PVC fittings on the drill press.

Since I didn’t have another cross fitting, I used a tee and drilled a 5⁄8ths hole in it.
I first pressed the bearing in, then drilled 5⁄16ths through it so the hole would be centered.

The bearings slipped in nicely.

Cutting the all-thread to length (started with 24″, later used 18″).

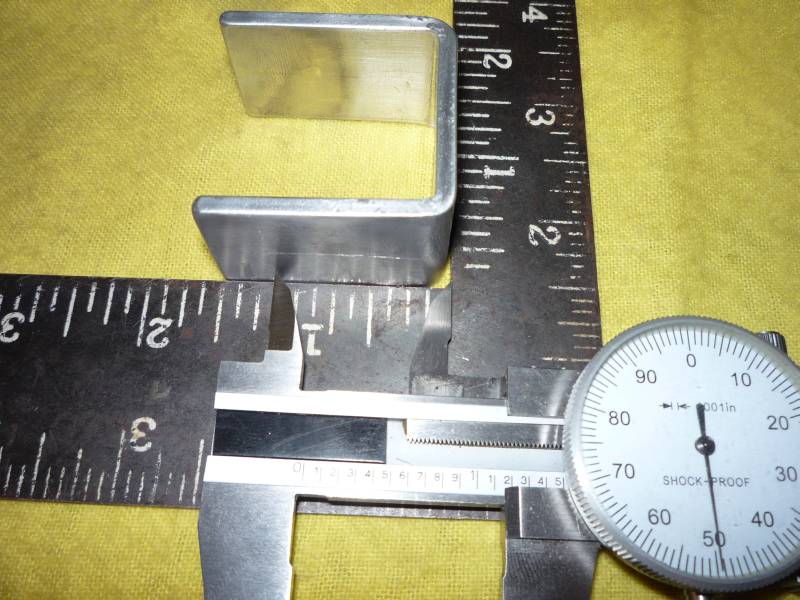
The yoke needs to be at least this deep to clear the fitting.

Measuring and cutting the flat-bar for the yoke.

Marking. This one failed and and I made another out of 1⁄16th×1 so it would be easier to
align it to the bearings. If the sides of the yoke are not parallel, it will bind the bearings.
I didn’t know at this point that the yoke needed to be much more precisely made.
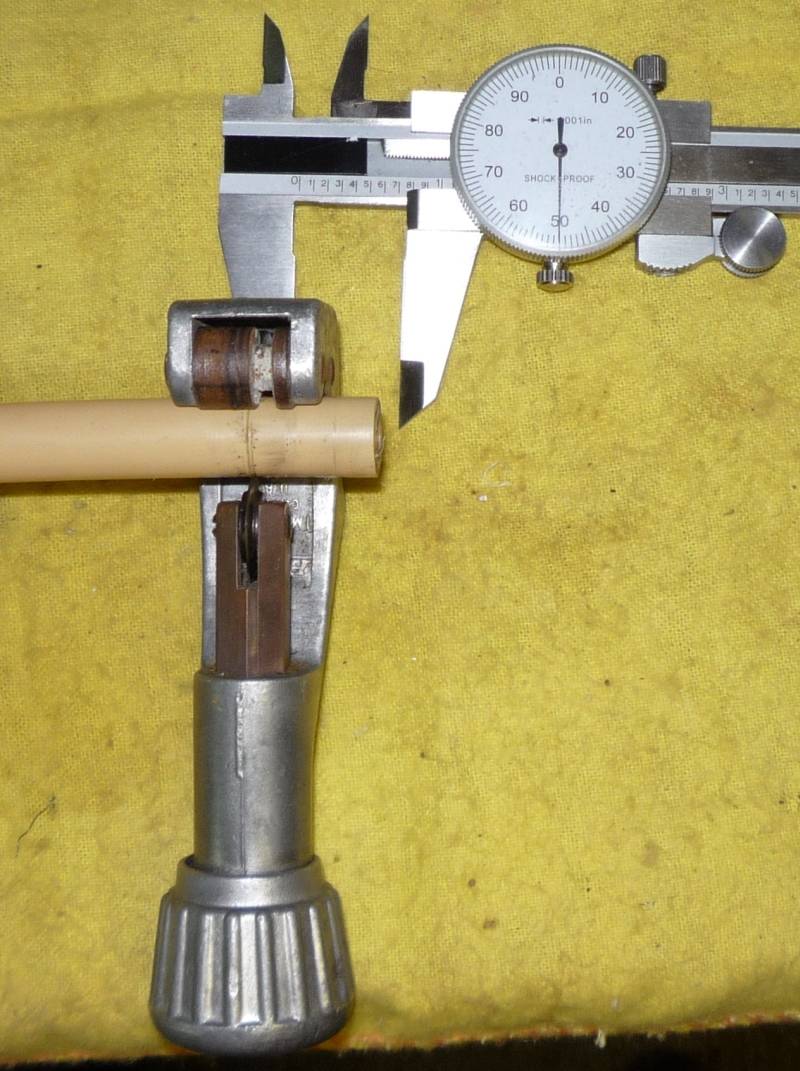
I need a custom spacer to get the top nut out of the fitting, so I used a piece of PEX tubing.
Note that there is a metal skateboard bearing spacer on both sides of the bearing.
Here’s the gimbal assembly so far. Looks a lot better than the first one!
I didn’t know that the sides were not bored straight.

Now to bend the yoke. Note: Don’t drill the holes before all the bending is done!

The parallel sides need to be this far apart…
…so the yoke needs to be bent here.
The yoke needs to be slotted.

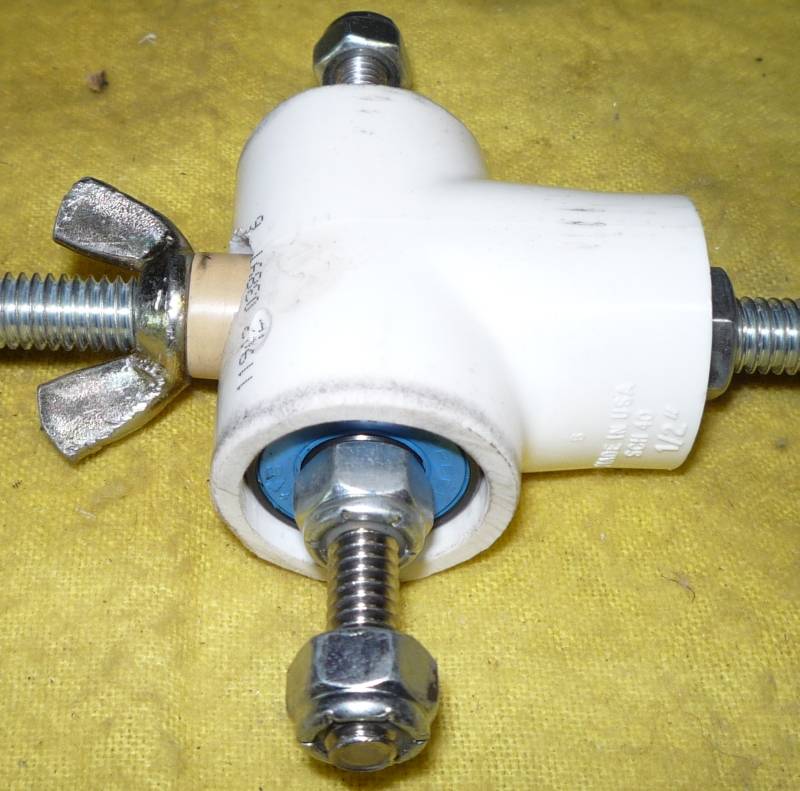
Here’s gimbal #2. It works, but seems to be in a bit of a bind…? and it leans a little.
I didn’t know it then, but my table saw didn’t cut the fitting exactly straight, so
I didn’t bore the fitting straight. This misalignment put a small bend in the X-axis.

I spent another eight hours re-working gimbal v.2, and it just would not act right.

It looks okay, but the side-bearing bores are not quite straight. There is a slight bend in the
X-axis, and the three axes do not quite intersect, so the stabilizer always leans a few degrees.

I thought the screws were not quite centered in the bearings,
so I made these tapered nuts. Didn’t fix it.
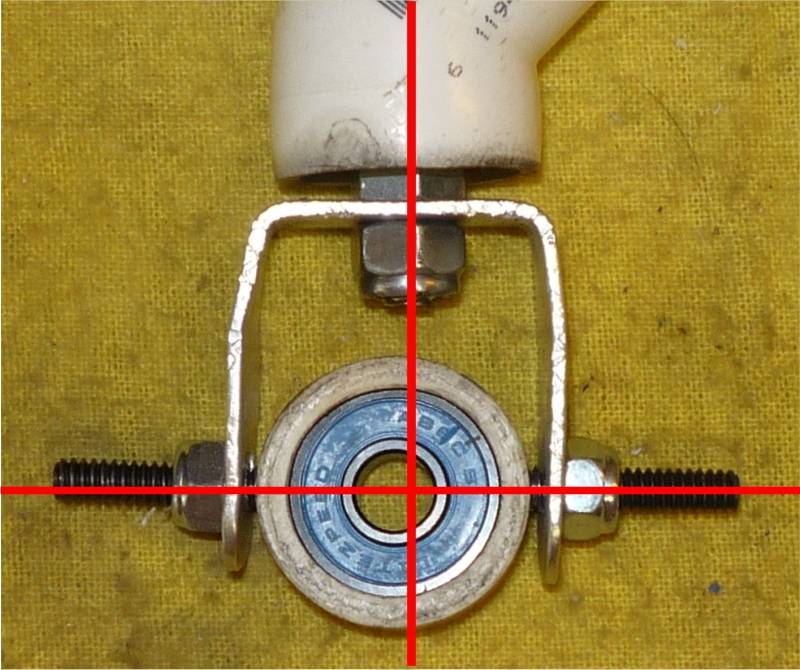
Gimbal Assembly v.3 (success, after two tries)
I decided to abandon the PVC Tee gimbal and start over—again. I dispensed with the X-axis bearings and used pointed set-screws. Since you can’t drill the bearing, it needs a sleeve around it that cane be drilled to accept the set-screws. This arrangement will allow shifting the yoke left and right by adjusting the set-screws until the stabilizer stands vertical. Fore-and-aft placement of the yoke is also critical, so the holes in the bearing sleeve must be placed exactly across the center of the bearing.

I made a PVC sleeve for the Y-axis bearing, drilled it on both sides, then pointed
two set-screws and made a yoke. Neither were done with sufficient precision.
This worked very well, except the stabilizer still leans. The yoke is too sloppily made,
and the axes do not intersect. You’ll never balance a stabilizer if the X and Z
axes do not exactly intersect the Y-axis (the vertical shaft).
Well, let’s consider this yoke a joke, and make one with greatest possible precision.

It will be made of 1×1⁄8th flat-stock. The 1⁄16th is too thin to hold good
threads for the 10-24 setscrews, and it was a little flimsy.
I feared it might spread and dump the camera on the ground.

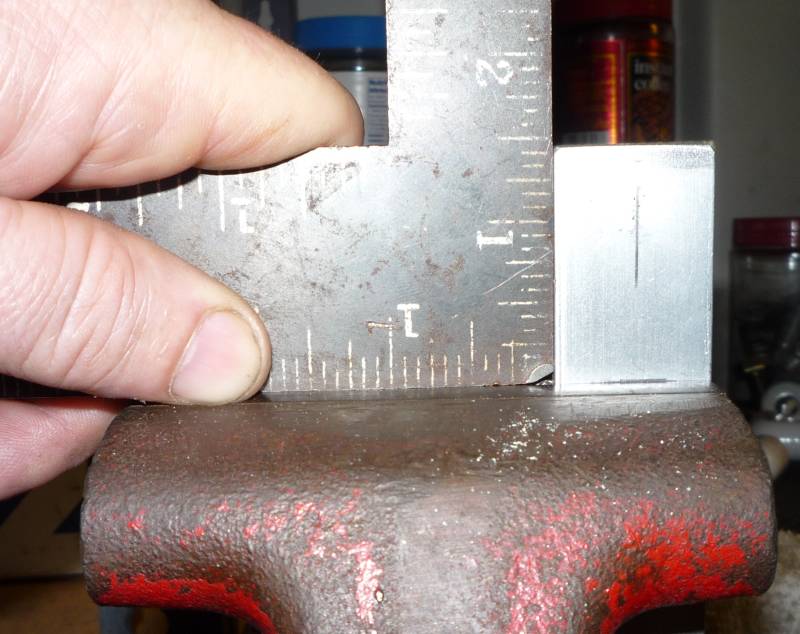
Finding the center of the 4.175″ long piece. Measure from both ends
and scribe two lines with an awl. Do the same for the width.
Marking the bend points.
Squaring the bends.
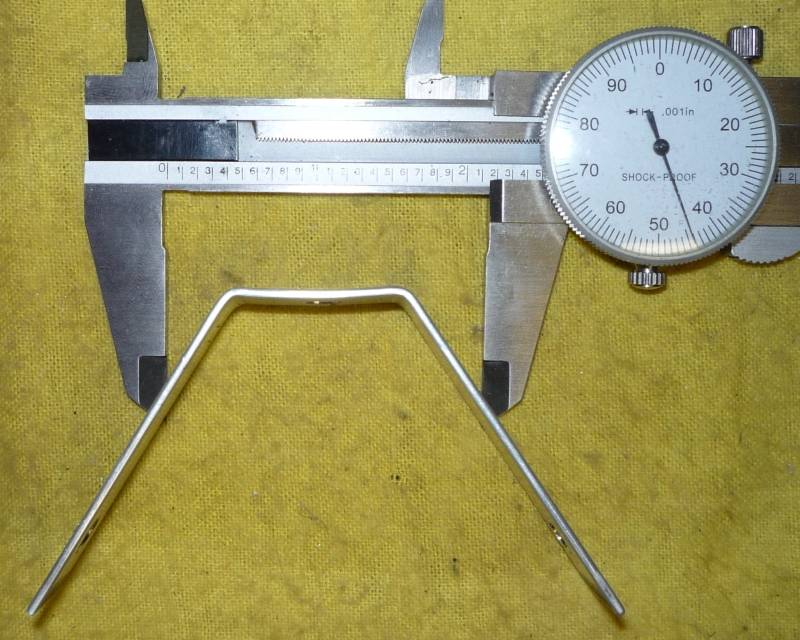
The sides must be exactly parallel.

Measure several points inside.

Correct a little twist. I got the sides parallel within 0.005″.
Checking, checking, and re-re-re-checking. I’m not gonna start over again!
No matter how carefully you bend, there will always be a little error…
Correcting the twist.
Well, it came out 1.512″ wide.

Now to find the exact center. This is a very critical measurement—if that Z-axis hole is off,
the stabilizer will lean left or right. I can adjust the yoke side-to-side a bit with the set-screws,
which makes this design superior to the previous one.
Measure and scribe from each side. The center should be
between two close scribes. Do the same for the width.

Checking and rechecking…

Should be right there!

Punch

Drill pilot hole with a 1⁄16th bit, then check it and enlarge it to ¼.

Now for the set-screw holes. These form the X-axis, and must be very precise.
Measure and scribe…
Checking and rechecking…
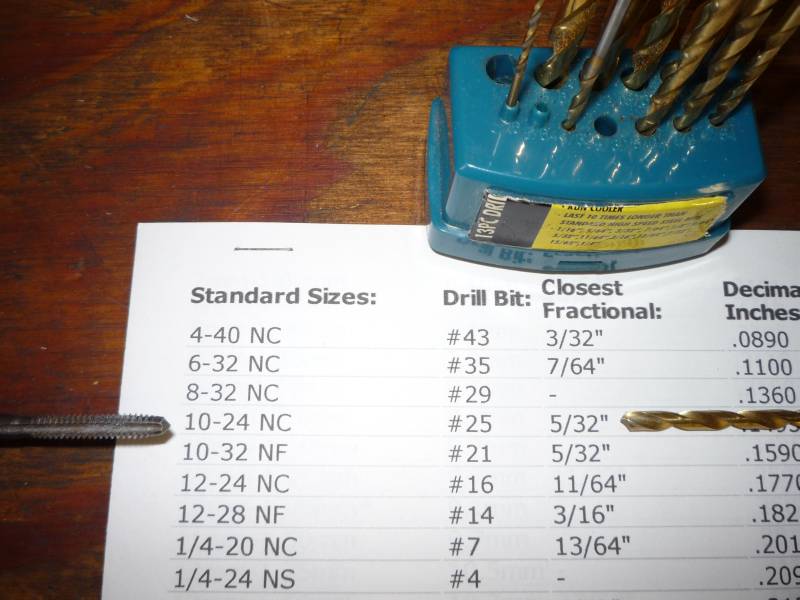
Get the correct bit for the 10-24 tap.

You gotta love to hate a small drill press… I need a set of stubby bits.

So I made one…

…a whole set!
That’s more like it. Now to drill the holes. Drill lightly so as to not bend it.
I didn’t have enough drill-press clearance, but this should be drilled through
both sides in one pass so they will be exactly aligned.

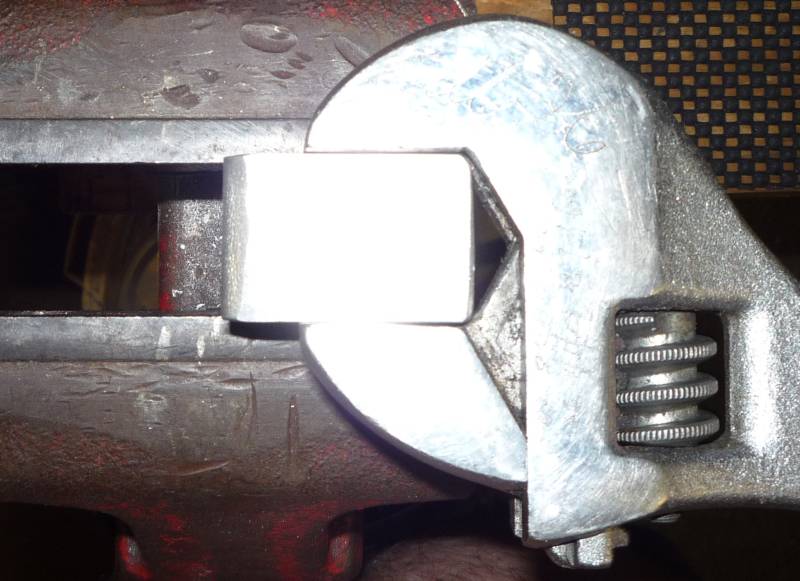
They are a tiny bit misaligned. A little tweaking with the big wrench fixed that.
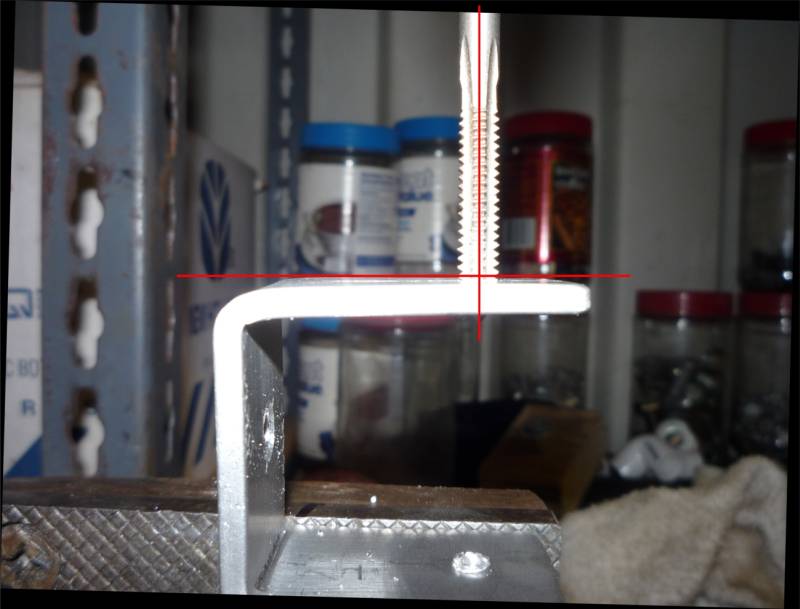
When tapping, it’s very important to start slowly and get it straight…
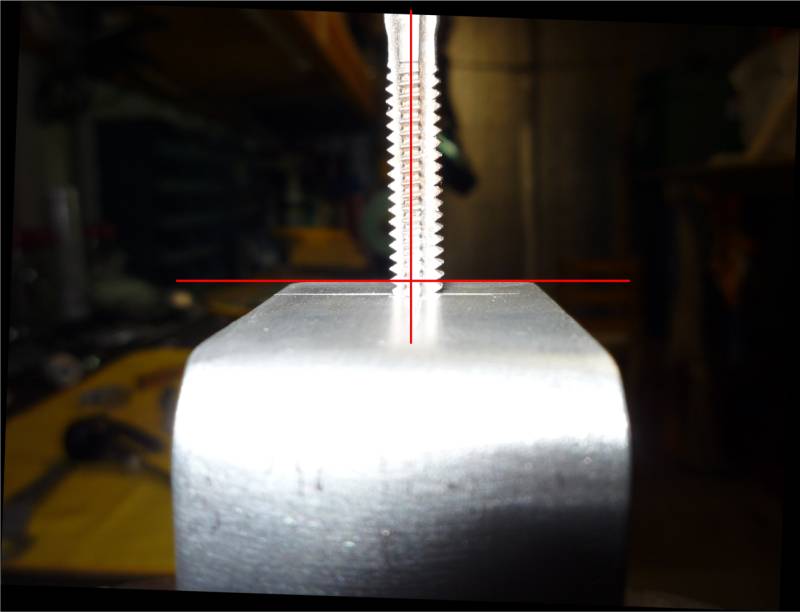
…in both axes. The position of the holes is irrelevant if the set-screws are
not straight. A better way is to put the tap in the drill press and turn it by hand.
When tapping aluminum, back it out several times and clear the chips.

And there it is! Finally! A gimbal that works!

A bit of tweaking the set-screws, and it balances plumb! And yes, that
door is vertical—I leveled this shop with a water tube.
But it still isn’t balanced front-to-back, so I re-did the bearing sleeve.

I made another PVC sleeve, this time with its collar inside.

Sleeve with collar inside

Truing sleeve on the bearing — this is so I can take accurate measurements.
Cut lightly, turning the part by hand. Watch your fingers! That end mill is razor sharp.

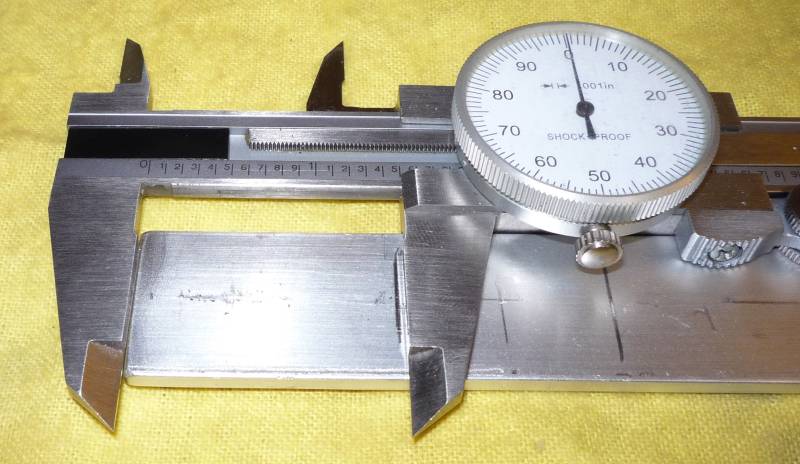
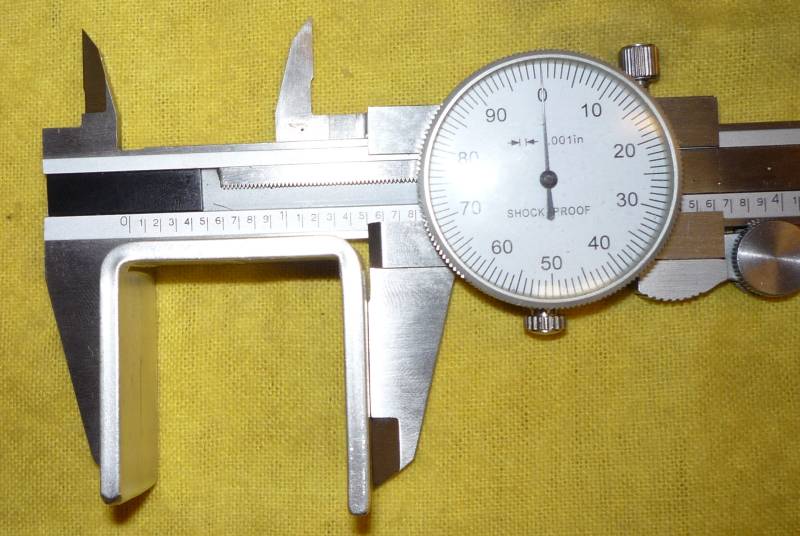
Measuring bearing depth in sleeve — .063″. That extra bit is necessary
so that when the sleeve cools it shrinks and captures the bearing.

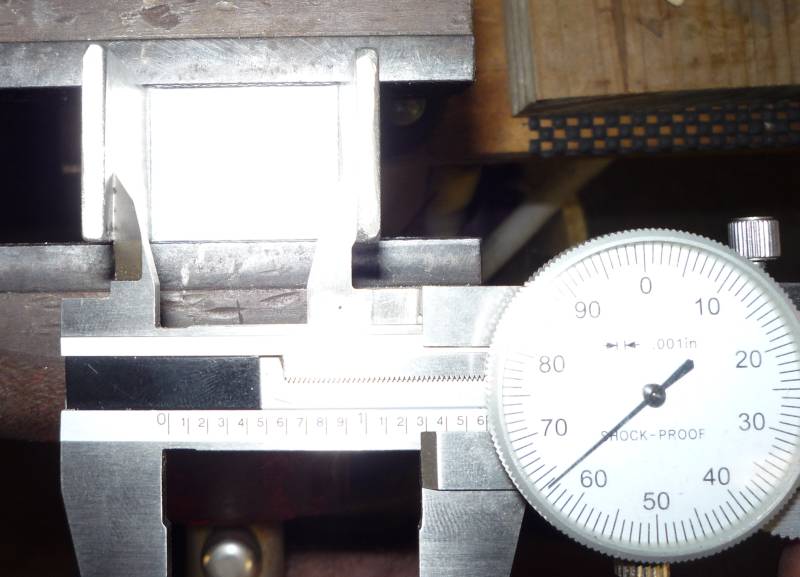
Measuring profile — depth in sleeve plus half the bearing thickness.

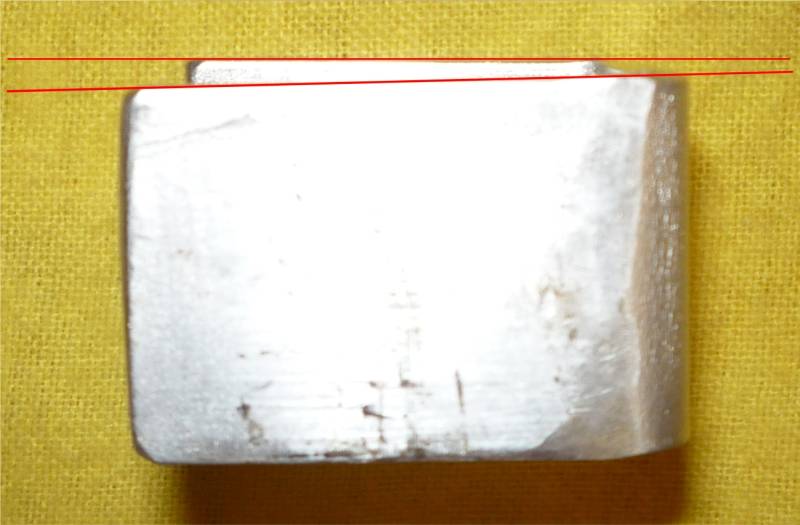
Measuring center — measure and mark from each side and compare.

Clamp the sleeve and bearing between two straight-edges. This allows you
to drill one side, flip it over exactly 180°, and drill the other side.
Drilling the sleeve. Stop when you see the tiniest bit of metal come out.

Deburring by hand with a 90° Vee router bit

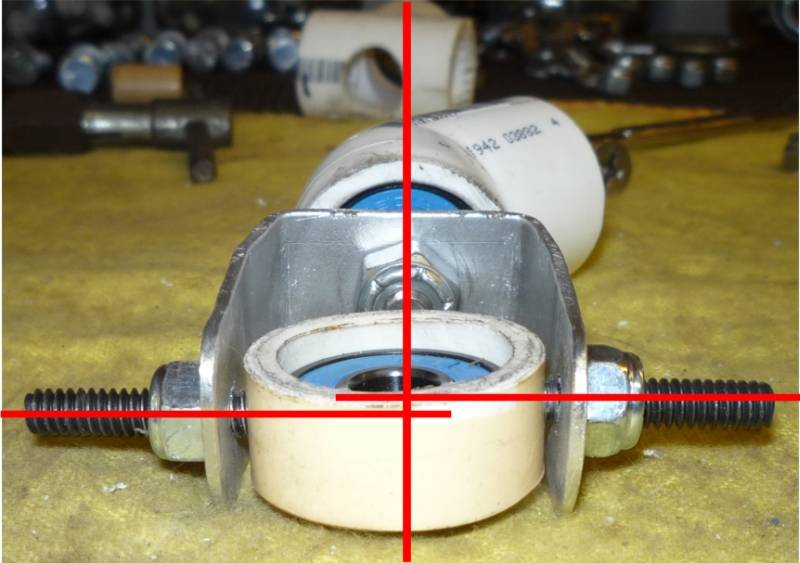
Final gimbal assembly. It works! And it doesn’t bind or lean.
Looks crooked here, but that’s just photo parallax.
Now let’s back up a few days and show the other parts.
Camera Mounting Plate (v.1)
Since I’m making this for a specific camera, there is no need for the camera plate to be adjustable. It just needs to adapt the camera mounting hole (¼) to the vertical shaft (5⁄16), and correct the C.G. offset. Final X and Z balancing will then be done with the three weights on the base. This was actually the easiest part to make.

Since the plate will be tapped for the 5⁄16ths rod, I used ¼″ flat-stock. It needs to be no more
than 3 inches long, so I can open the battery door on the camera without dismounting it.
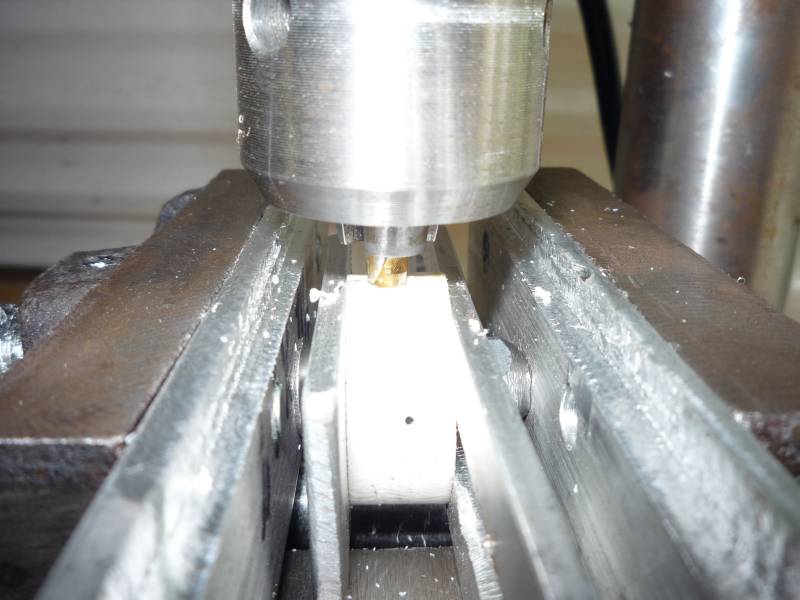
This is where the camera mounting slot needs to go. Note the open battery door.

You need to mount the plate and mounting bolt on the camera, then balance them on
a point and locate the balance point (I used the center-punch vertically in the vise),
then drill and tap for the rod. I cut the slot first, and didn’t know it would
be so close to the tapped hole. Most of the slot is useless. YMMV.
Mounting Plate complete.

I added some chamois to the plate to pad the camera. Thin cork works, too.
Make sure to number the legs and always align top plate with leg #1.
Weight Legs
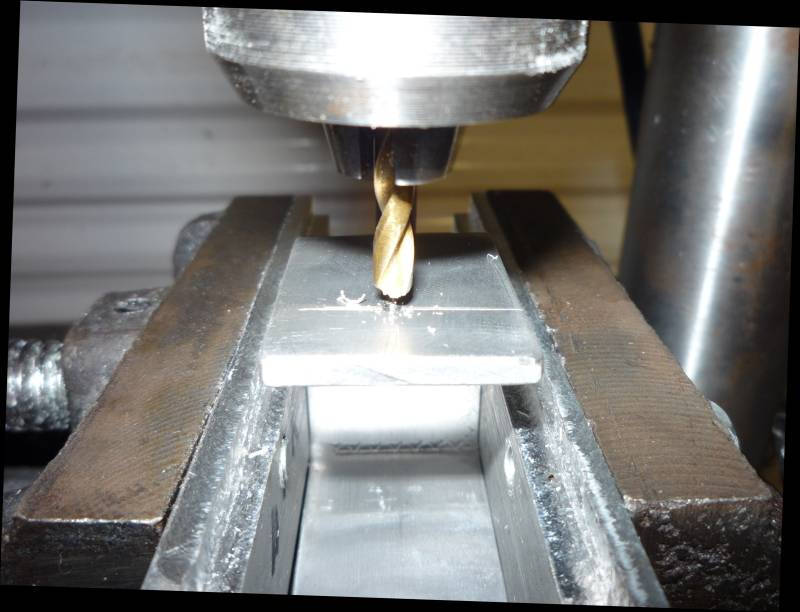
I decided to use three legs so the stabilizer would stand up, making it also a tabletop tripod. Slotting the aluminum was a major pain, because I bought the $30 cheapo cross-slide vise and had to work on that all one day. Once it was working reasonably well, cutting the blind slots was easy. I used a ¼-inch carbide end mill in the drill press, turned it at 3200 RPM, and blew it with the air compressor. No lube needed. I also made custom jaws for the vise and cut a step in them. The jaws are ¼×1 6061-T6.
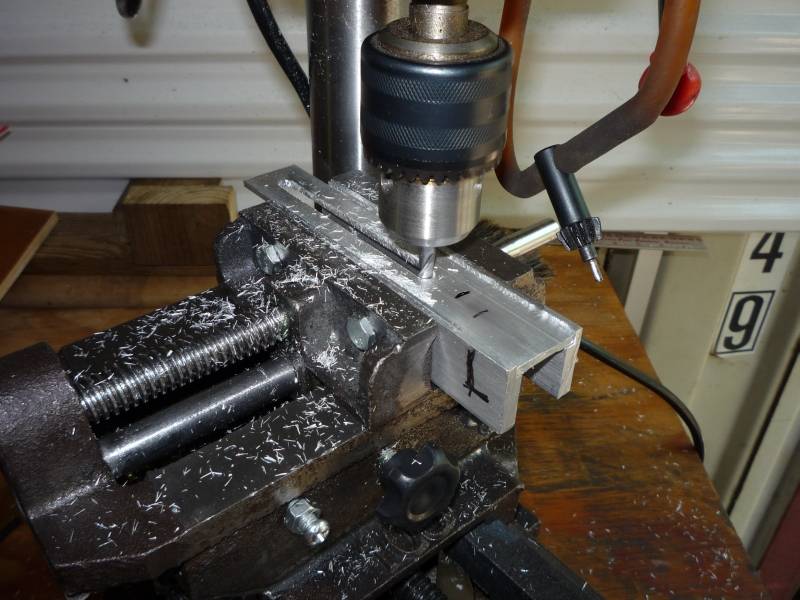
I cut 3 pieces of 1⁄8th×1 flat-bar 6 inches long, and slotted them 4½ inches.

After a bit of filing and brushing, here’s the three-leg base. Look good!
I later bent them down a bit so the stabilizer stands vertical.
Aerodynamic Balance
During my first outdoor walking test I discovered that the view-screen on the camera is going to point down-wind like a wind vane. I made a piece of polyethylene the same size and added to the shaft, opposite and below the gimbal.

8¼ inches above the gimbal is this large wind vane. At walking
speed, the camera will pan with the view-screen downwind.

8¼ inches below the gimbal, on the opposite side, is this counter wind vane. It works!
But you’ll still have some wind-vaning when your body blocks one but not the other.
Pan Control Wheel
I thought I needed a nice pan control, so I made one out of a skateboard wheel. It looked neat, but it didn’t work so well—it’s just too big, and the lightest touch upsets the balance. I later removed it and discovered that the 3/8ths PEX tubing I used on the shaft makes an excellent pan control. But here’s how to grind down a skateboard wheel if you have need to do so.

I ground down some flat-washers and pressed them into the wheel, put in a bolt and three nuts,
clamped it in the vise, and turned the wheel by hand against the running end mill cutter.
That took about two dozen passes on each side.

Then I polished it up with a side-grinder and added it to the shaft.

Here’s the stabilizer before I removed the wheel and extended the PEX tubing.
Simple Body Mount
Try holding your arms out in front of you and walking around for an hour or two. Then try it with 2-3 pounds extra weight. I imagined, and then built, this simple body mount. It doesn’t soak up vertical motion like a real Steadicam, but it does help with the arm fatigue. It’s very easy to put on and take off.

A strap, some PVC, and a bungee cord.

It works like this. It needs a little more design work, but it’s gonna be OK.
It supports the weight of both arms as well as the rig,
and leaves fingers free to control the pan.

If your camcorder has a strap like this, Velcro it so it doesn’t flop around and mess up the balance.
X-Y Camera Mounting Stage (v.2)
I didn’t want the added complexity, but found that I needed an adjustable stage under the camera to balance the rig with various lens accessories. I pondered how to build it with the crummy tools I have, and concluded that my drill-press-cross-slide is nowhere nearly accurate enough to cut dovetails, so I ended up making the simple double-plate device you see below.

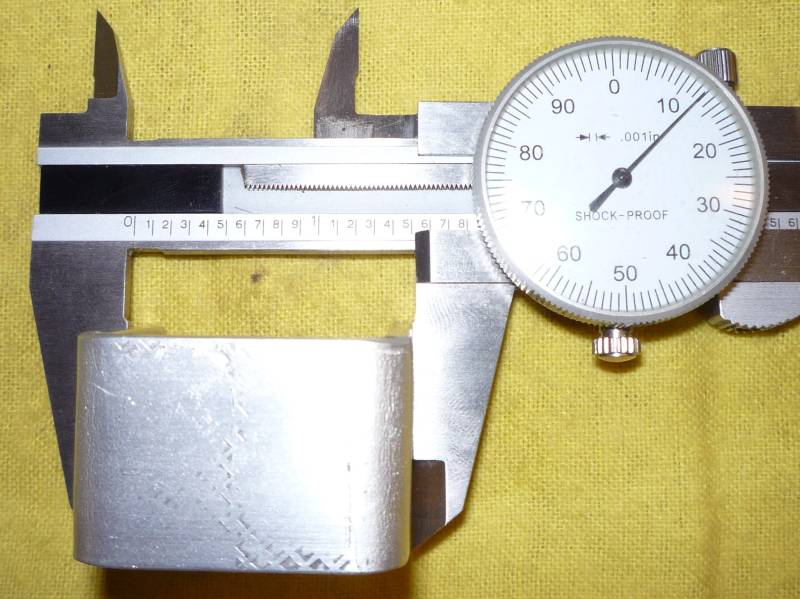
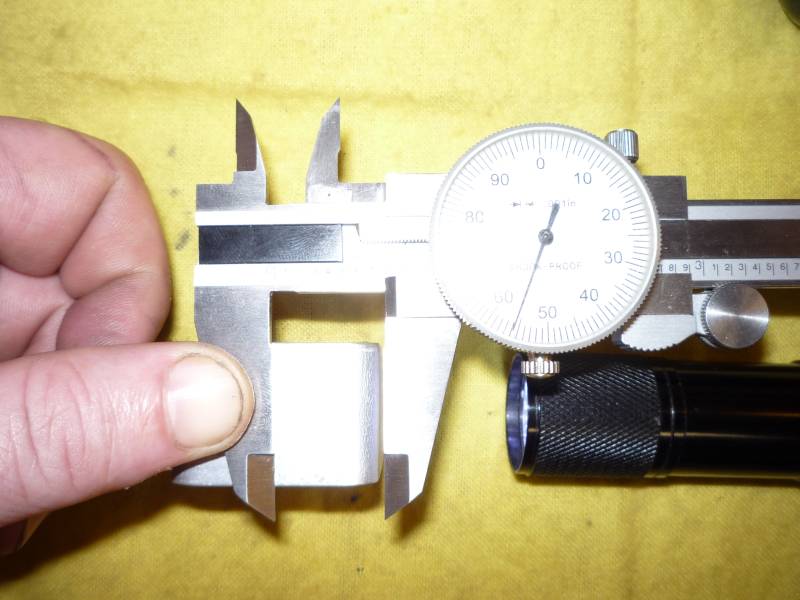
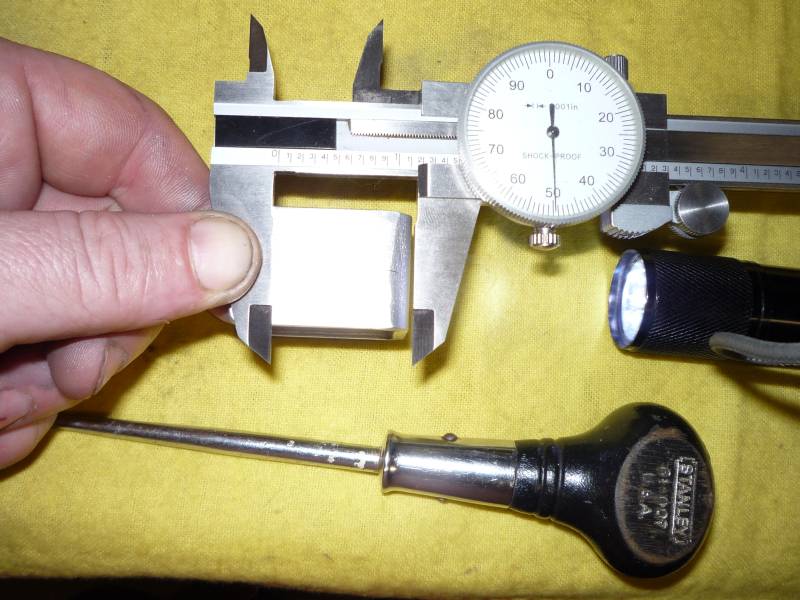
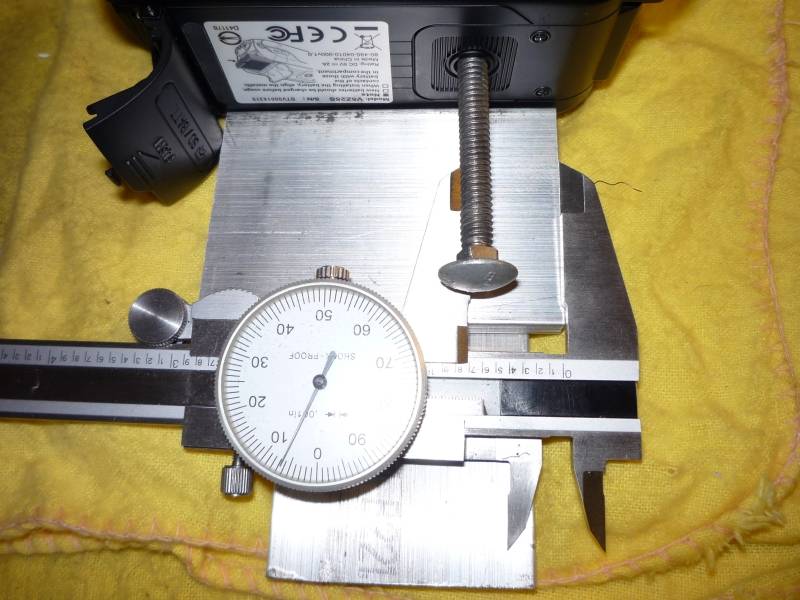
The amount of Z-slot needed must be determined first, as it sets the overall size of the stage.
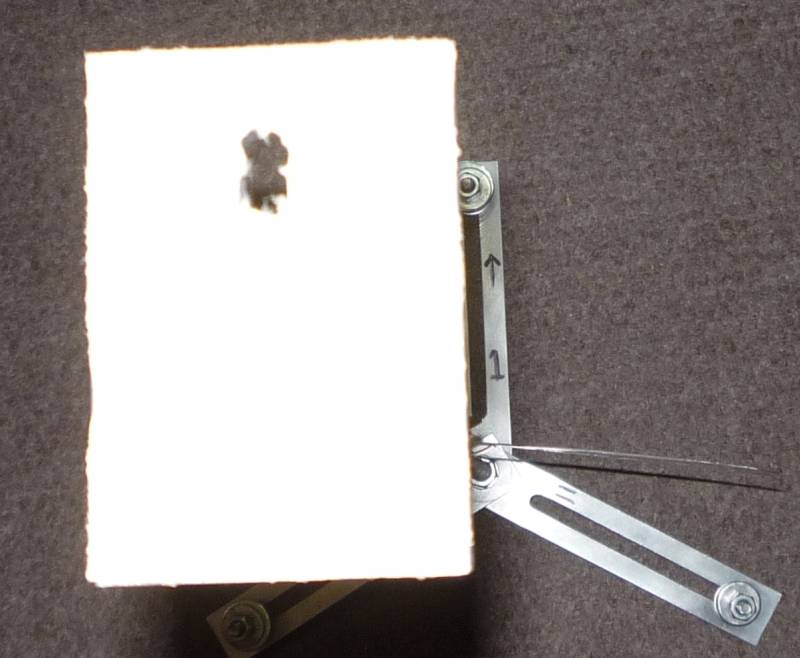
Here’s the balance point with two filters and a wide-angle lens…

…and here’s the balance point with no lens accessories.

There’s the amount of travel I need; add the diameter of the camera mounting bolt
and call it 1½ inches. I ended up cutting the slot about 2 inches long.

The parts will be 4 inches of 2-inch and 1-inch-wide ¼-inch 6061-T6, and a couple SS screws.

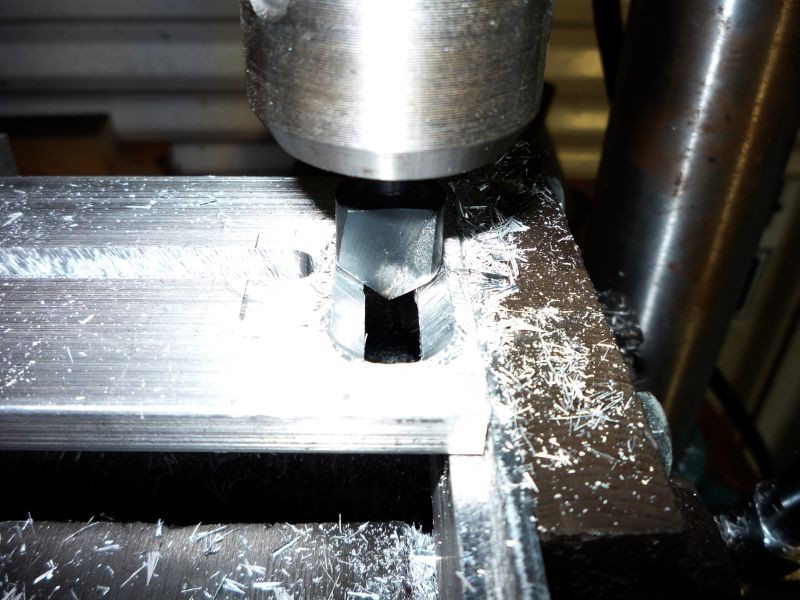
Cutting the three slots with the carbide end mill.
Beveling the transverse slots to countersink the flat-head screws.

Here’s all the parts, after wire-brushing, ready for assembly. Note the lower plate
is tapped for the ¼-20 screws; the middle hole is tapped for 5/16th stabilizer shaft.

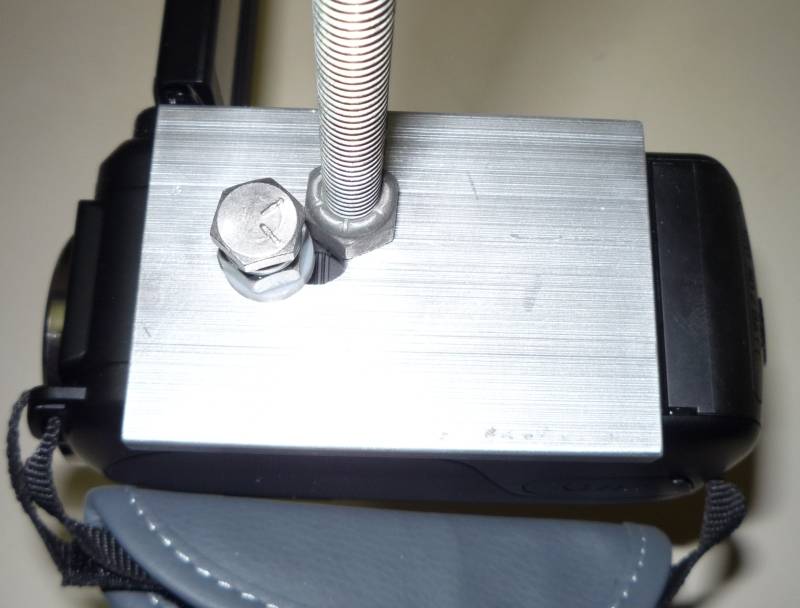
Assembled. The lower nuts tightly lock the screws so that you can release the upper nuts
(for adjustment) without having to remove the camera to get to the Phillips end of the screws.

Top view

A piece of Velcro (loop-side) makes a nice pad for the camera.

And there it is, mounted onthe stabilizer, with camera and big lens.
Notes: I discovered that having the camera offset to balance the viewscreen is a bad idea—when you add a heavy lens not only is the front-back balance off, but the side-side is, too! So here’s what you wanna do: Don’t make the transverse slots; just mount the top plate on-center, then add an adjustable weight to the side to counter-balance the viewscreen. Then when you add weight (lens accessories) to the front only one adjustment will be necessary since the accessory will be in-line with the Z-axis. You can see in the photo above that I twisted the camera some to put the big lens on-center. I’ll probably build yet another top stage with no side-side adjustment, but with added threaded weight for side-side balance (with sincere thanks to Mr. Schlater).
Balancing the Rig
- Number your weight legs and always mount the plate and camera aligned with #1. Don’t forget to put the camera in its operating configuration: lens cap off, viewscreen open, etc.
- Set the gimbal position so the rig is balanced horizontally when held only by the gimbal handle.
- If you made a stationary top stage: Keep adding and removing weights from the legs until the horizontal rig doesn’t rotate. You’ll need a bunch of washers—some that weigh 6, 5, 4, 3, and 2 grams. Don’t go by size—flat-washers are various thicknesses—use a digital scale and sort them by weight. As you add total weight, re-balance the gimbal for horizontal, or just hold a straight-edge under the heavy end to keep it horizontal.
- If you made the X-Y top stage: Put exactly the same amount of weight on all three legs (I used 56 grams per), then use the X-Y stage to balance the rig. Hold it horizontally and keep moving the camera little by little until it has no tendency to rotate. This will balance the rig and, as a bonus, achieve dynamic balance as well. Once it doesn’t roll, all you need do is set the gimbal for the proper 2 second drop-time, and you’re done.
- Note that adding more total weight will both set the gimbal at a lower position and also increase the pan stability. If your base is too light, pan will be very hard to control. With the gimbal in the center of the shaft, total bottom weight (weight legs) will equal total top weight (camera and plate). This is a good place to start.
- Now move the gimbal up a few threads until the 90° drop-time (horizontal to vertical) is 1 to 2 seconds.
- If the rig leans one way, no matter which way it is pointed, your gimbal assembly is off-center. If leaning to the side, adjust the yoke set-screws. If leaning front-to-back, re-drill the bearing sleeve more accurately, making sure the divots are exactly centered on the bearing.
- Once it stands vertically, test the dynamic balance by rotating the shaft slowly. If it wobbles, you’ll need to move a weight in or out along the slots, and re-balance, until it doesn’t wobble. This should not be a problem if you drilled, tapped, and mounted the camera plate at its balance point as described above, and your base weights are nearly the same.
- Slowly rock the gimbal yoke up and down. If it imparts motion to the rig, loosen the set-screw tension a tiny bit.
- Hold the handle and accelerate the rig left and right. If it rocks the rig, decrease your drop-time.
- Walk around with it in a complex pattern. If it rocks all the time (like a seasick boat), your drop-time is too fast or slow, or you have too much friction in the gimbal.
So there you have it—my third camera stabilizer project. It works! 🙂 Go build yourself one!
Skip all my mistakes and make it better!
Just remember to take your time, be extremely precise, and work safely.
Stay Tuned!
Next, I review the horrible $30 cross-slide vise as a drill press milling machine.
Then I reviewed the Aiptek AHD-H5 Extreme camera, put threads on it, then reviewed some filters and lenses.
In the works: I’m gonna build a shoulder-mount, walk-around, 20-foot telescoping jib, with a stabilizer on the end, remote-controlled with fishing lines… But this is the summer of ’11 and the 100°+ days are postponing my shop work. Meanwhile, I designed and built some DIY studio lights, and a green-screen, and played around with some editing software.
—KV5R